CANSAT
Cansat(カンサット)とは,1998年に米国スタンフォード大学のTwiggs教授が提唱したもので,もともとは350ml缶サイズの模擬人工衛星を指した.同国のアマチュアロケットグループ(AeroPac)協力のもと,Cansatを高度約4kmまで打ち上げるARLISSという大会がネバダ州ブラックロック砂漠で毎年開かれている.Cansatはロケットから放出されたのち目標地点へ向う自立制御を行い,目標地点までの距離や経過時間を競う.


CANSAT 2009
2009年度開発したCansat(機体名:Space Crawler)は,2008年度開発したものと同様にFlyback制御とRunback制御の双方を実現可能な機体である.さらに,不整地走破性の向上を目的として,Crawler機構を採用している.Space Crawlerの移動目標として,空中と地上の2種を定めた.まず,ロケットから放出後,空中の目標領域への飛行制御を行い,地上付近で超音波センサを用いた距離計からの信号によりパラグライダーを分離し,本体が着地する.次に,着地時の衝撃緩衝用のカバーを分離し,ローバーが地上の目標地点への走行制御を開始する.

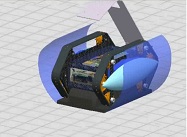
Space CrawlerのRover外観図
CANSAT 2008
動設計学研究室は2008年度よりARLISSに参加した.従来のCansatには,着地後に車輪駆動による走行制御を行う機体とパラグライダー操作による飛行制御を行う機体の2つのタイプがある.例年,ARLISSでは強風に敵わず多くの大学がFlybackにおいて風に流されてしまい,制御が利かなくなっているFlyback機構のみでは高精度のComebackは厳しく,Runback 機構が有利となっている.しかし,RoverにはComebackするまでの時間が長いという欠点がある.こうした背景の中で確実に目標地点へ近づく機体開発と目標地点への到達時間の短縮という課題が明確である.そこで,私達はFlyback機構とRunback機構を兼ね備えたHybrid型の機体,SDDL#01を提案しARLISS2008へ挑んだ.この衛星は,GPSセンサおよび気圧センサを載せており,これらのデータをもとに,目標地点へ向かう.また,各種センサおよび制御データを記録用メモリに保存すると同時に送信機により,地上へ送信する.
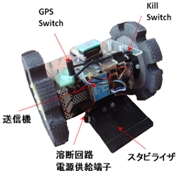
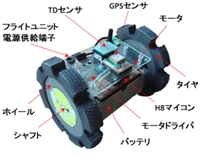
FlightModelのRover外観図
Cansat 2008のビデオ紹介